Robotic Limb for Devices
MobiLimb is a robotic finger that can be deployed on mobile devices.
What if smartphones could touch us and reach our world? This project explores a future where anthropomorphic devices bring news input and output capabilities to existing devices.
MobiLimb is a research project made by Marc Teyssier, Gilles Bailly, Catherine Pelachaud and Eric Lecolinet.
Researchers are from Telecom ParisTech, HCI Sorbonne Universitéand CNRS.
Press: BBC, New Scientist, DigitalTrends, Reuters, The Verge...


What is Mobilimb ?
MobiLimb is a new shape-changing component with a compact form factor that can be deployed on mobile devices. It is a small 5 DoF serial robotic manipulator that can be easily added to (or removed from) existing mobile devices (smartphone, tablet). In the spirit of human augmentation, which aims at overcoming human body limitations by using robotic devices, our approach aims at overcoming mobile device limitations (static, passive, motionless) by using a robotic limb.
This approach preserves the form factor of mobile devices and the efficiency of their I/O capabilities while introducing new ones:
- The users can manipulate and deform the robotic device (input)
- They can see and feel it (visual and haptic feedback), including when its shape is dynamically modified by the mobile device.
- As a robotic manipulator, it can support additional modular elements (LED, shells, proximity sensors).




How is it made?
MobiLimb is a robotic manipulator with a kinematics structure of five revolute joints in serial. it is composed of four main parts of the system: the actuators, the sensors, the embedded electronics, and the controller.
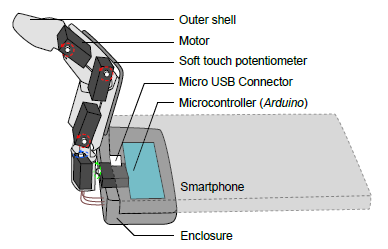
Actuators: We used five PZ-15320 servo motors, which provide a torque sufficient to support the weight of a smartphone (130g) and can apply a contact force of about 0.8N. Two motors, mounted on two orthogonal axes on the base, carry the first link. Every other link has its own revolute joint parallel to each other. A 3D printed plastic structure was designed to hold together the servo motors without constraining motion at the different joints.
Sensors: Servo motors provide their own angular position as feedback. This allows calculating the shape of the device. A flexible potentiometer (under the shell on the back of the device) detects when and where the user is touching MobiLimb.
Microcontroller and smartphone integration: The motors and an Arduino Leonardo Pro Micro microcontroller are packed within a thin 3D-printed base attached at the bottom and on the back of the phone.
API and applications: We developed an Android/Unity API to drive MobiLimb. The Unity application makes it possible to create, record and play animations
easily. Connection between Arduino and Unity is done using Udunio. To compose a fluid animation, it is possible either to use keyframes or to manipulate the physical robotic limb (using motor sensing) or its virtual representation on the device screen.


Skin and Aestheticism
To explore different aestheticism, we designed several textures. The first looks like a classic robotic shell (inplastic). One other is made of fur and the third one is a "finger-like" skin with a high degree of realism. This texture is made of painted Plastil Gel-10 silicon used in the movies industry to make fake limb and skin. Using a humanlike skin with the phone illustrates changes the perception of the mobile device from an inanimate object to an ’almost’ human entity.
More information
Open-source documentation in the making.
MobiLimb is published in UIST 2018, 31st ACM User Interface Software and Technology Symposium
Please reach me via email contact@marcteyssier.com,marc.teyssier@telecom-paristech.fr or Twitter @marcteyssier





Publication
MobiLimb: Augmenting Mobile Devices with a Robotic Limb Marc Teyssier, Gilles Bailly, Catherine Pelachaud, Eric Lecolinet UIST 2018 Conference Proceedings: ACM User Interface Software and Technology Symposium; 10/2018 PDF ↵
Medias
MobiLimb - High resolution pictures
MobiLimb - Download the video: Full version, without captions
Press
BBC, Feely finger phone crawls across desk, Oct 5 2018
New Scientist, Smartphone with a finger crawls across the table to stroke your wrist, Oct 4 2018
Engadget, Horrifying finger attachment lets your phone touch you back, Oct 5 2018
Fast Company, This nightmarish attachment gives your phone a finger of its own, Oct 8 2018
Digital Trend, Give your phone the finger with this creepy, versatile robotic attachment, Oct 5 2018
Other Mobilimb Press: Daily Mail UK, Metro, ZDNET, Arduino, Android Authority, Hexus, Tech Radar, Hackaday, PC Mag, Slash Gear, Hot Hardware, ScienceAlert, Cnet Japan, PC Welt, Yahoo headlines, Engadget Japan, Sohu, Chip, Seamless